Engineers from MIT have recently developed a new robot that can manipulate its grip. The scientists have discovered a way to give robots more dexterity in their grippers by using the environment.
The scientists at the Massachusetts Institute of Technology created a robot that is able to predict the force it needs to apply in the robotic grip in order to push numerous things in the environment and to adjust its grip on the object it tries to manipulate. For example, if a gripper from a robot tries to pick up a pencil at the middle, but accidentally grabs the end with the eraser, the robot will be able to use the environment in order to adjust its hold on the object.
Instead of simply dropping the pencil and attempting to pick it up again, the new model will enable the robot to loosen the hold a little and push the object against a nearby wall, enough to slide the gripper from the robot closer to the midpoint of the pencil.
The researchers designed the new model to take into consideration a number of factors in order to predict how an object might move while the gripper pushes said object against something inside the environment. Those factors include the object’s mass, shape and inertia, as well as the frictional forces between the object and the gripper, and between the environment and the object.
An assistant professor of mechanical engineering, Alberto Rodriguez and a graduate student, Nikhil Chavan-Dafle have developed the new method of approach. The new technology will allow existing robots in medicine, disaster response, manufacturing and other applications based on grippers to interact with the environment surrounding them, in a cost-effective matter. The robots equipped with the new technology will be able to perform maneuvers that are a lot more complex.
Rodriguez said that mimicking the human hand is a very valid focus in robotics. However, if you can’t afford to have a hand that is very complex to use and costs $100,000, the new method brings a little dexterity to simple grippers.
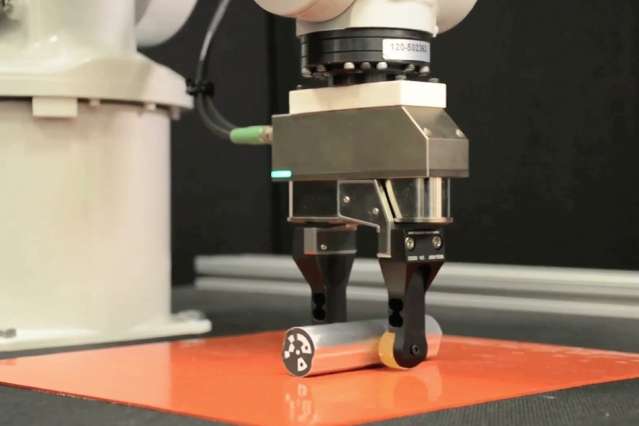
Chavan-Dafle and Rodriguez have tested the predictions of the new model in simple experiments, by using a simple gripper with two fingers to control a small rod, either by sliding, pivoting or rolling it against three things in the environment: a plane, a line and a point.
Rodriguez said that it proved to be quite effective and that at the moment they’re planning to see how they could program motions that will generate certain trajectories.
Image Source: cdn.phys.org
{kind=link}
Leave a Reply
You must be logged in to post a comment.